 [Blind Gossip] This scripted drama has been a staple on cable TV for many years.
[Blind Gossip] This scripted drama has been a staple on cable TV for many years.
This actor has been part of the family-oriented show’s ensemble cast for a long time.
Despite spending years on this successful TV series, something has gone very wrong.
He lost his apartment and is now living out of his van.
Now we’re not talking about an adventurer who bought a Mercedes Sprinter Van and had it custom fitted it so he could spend a year traveling around the continent like this:

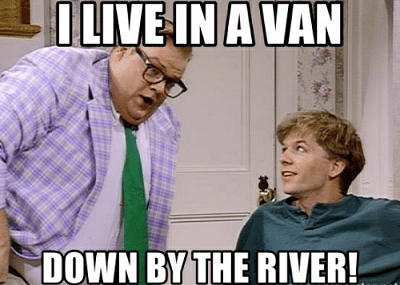
We’re talking about about this:
We don’t know the exact circumstances around his current living situation, but we do know that it doesn’t seem like he planned any of it.
His social media posts have become a bit erratic and are filled with odd quotes.
We hope that his friends, family and colleagues can intervene and get to the heart of what is going on with him.
Similar: The Poor Me Actor
Actor and/or TV Show:
[Optional] Do you think you would enjoy living in a luxury van or RV and traveling the country? Short or long term?
luvprue1 says
The more I think about the more I think it’s Steve howey . Van being a clue. Howey played Van Montgomery on Reba.
mittens says
Somebody from Heartland?
I’ve never seen the show but
Long-running
Family-oriented
Cable
Scripted Drama
Ensemble cast
“get to the heart of what is going on with him.”
Conchord says
Steve Howey of Shameless seems like the best bet.
Other guesses that seem to be wrong: Pete Davidson (show isn’t on cable or family-oriented), Andy Dick (only done 2 shows in which he was on for multiple years, and they were network shows that were not family-oriented), Brian Van Holt (show was not family-oriented), Kardashians (show isn’t scripted), Robert Iler (blind suggests that the show is still going).
LisaNewcar says
Robert Iler. He was on a cable tv series “The Sopranos” which was a show about a “family.”
scootypuffjr says
I’m on board with the Steve Howey guess.
He and his wife announced they were getting a divorce back in July.
He’s also well known for his role on Reba; his character’s name was Van.
ewiles says
My guess is Steve howey (shameless.)
Stefanie2530 says
I mean NO offense to your guess but I sure hope you’re wrong! I like Steve Howey and don’t want it to be him. Terribly sad whoever it is. Hope things change for the person quickly.
eddieslady84 says
As funny as it sounds, I have wanted to live in an RV since I was a kid so that would be awesome…I actually finally got my husband on board and that is our goal, get an RV travel the country and decide where we want to plant ourselves lol
mrw222 says
Me too. I have even wanted a Mercedes Sprinter just like that, so I loved the above photo. That would be me! I wouldn’t like to “live in a van by the river” though. LOL I feel sorry for whoever it is.
yashenny says
No clue, but for giggles I hope it’s Jonathan Cheban
ItsBouquet says
Beau Mirchoff?
DavyRogers says
I really thought about doing the van/rv thing for a long time, gave it very serious consideration. Unfortunately now is not the time. We no longer have the luxury of doing such things when so many people have no choice. Anyway, most vans that could be used for travelling are so expensive that it’s prohibitive for most people. If you want to live in different places, you may as well just move to a different place every 6 months and rent a cheap place. No idea who the actor/show is.
fiddlesticks says
Or do housesitting. It’s an amazing way to travel and yet not have all the inconvenience of travel, like finding accommodation
aaaLCT says
Ol´ Petey Davidson
Katmandu says
I would LOVE LOVE LOVE it….hope it’z not Ed O’Neill, LOL.
mrw222 says
I don’t know who this is but have to say that this article was hilarious!
OlsonAH82 says
Rob Kardashian?
dinamarieburnett says
I think it would be an fun adventure in an RV.
Katmandu says
I would love to be that cute girl in the picture, in that cute van – nice and bright and neat!…..Pete Davidson?
mountaingirl82 says
Pete Davidson
luvprue1 says
I want to change my answer. I think I know who this is:
Actor and/or TV Show: Andy Dick!
Andy Dick was just on twitter talking about having to live in his van.
aemish says
Good catch! I saw him on Celebrity Wife Swap years ago I know he’s a weirdo but I can’t help but have a soft spot for him. He was living in his van even then in the driveway of his ex-wife’s house so he could still be around for his daughters who he was very close with.. he had a great relationship with them and their mom, it was really weird but it seemed to work for all involved..
JipJip says
Justin Chatwin
luvprue1 says
I don’t know who this is. But I’m going to guess:
Steve Howey (actor from Reba)
Brian Van Holt (actor from Cougar town)